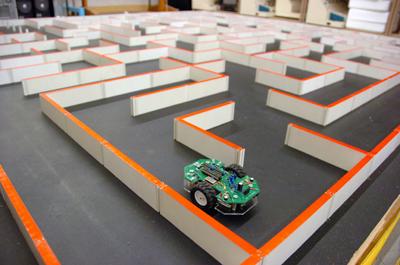
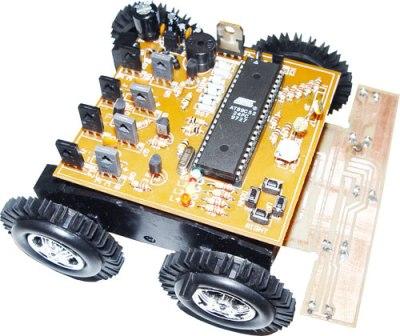
این پروژه تحت عنوان ربات میکروموس، در سه فصل تهیه شده است. فصل اول مستندات این پروژه به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک، انواع ربات ها، دسته بندی ربات ها پرداخته است. در فصل دوم کاربرد ربات ها و همچنین اجزاء ربات ها را مورد بررسی قرار داده شده است. در فصل سوم، ساختن ربات میکروموس، شرح عملکرد ربات، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات میکروموس به طور کامل قرار داده شده است. ربات میکروموس، رباتی است که می تواند در یک مسیر بسته حرکت کرده و مسیر درست را پیدا نماید. این مسیر می تواند یک خط سیاه در زمینه سفید یا به صورت دیوار باشد. ربات باید بتواند مسیر درست را از مسیر غلط در کمترین زمان تشخیص بدهد...
پروژه بررسی ربات میکروموس (MicroMouse Robot)، مشتمل بر سه (3) فصل، 44 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
ربات چیست؟تاریخچه ی پیدایش رباتتعاریف رباتعلم رباتیکمزایا و معایب ربات هاقوانین سه گانه ی رباتیکدسته بندی ربات هادسته بندی اتحادیه ربات های ژاپنیدسته بندی مؤسسه رباتیک آمریکادسته بندی اتحادیه فرانسوی ربات های صنعتیانواع ربات هاربات های متحرکطبقه بندی ربات هاربات های نظامیکاربرد ربات هاربات تعقیب خطربات های حس کننده تماساجزاء اصلی یک رباتمعرفی قطعات به کار برده شده در ربات میکرو موسمیکرو کنترلرچرخ هرزگردبرنامه ی ربات که به زبان بیسیک نوشته شدهتاریخچه ی مسابقات میکرو موسآیین نامه اجرایی لیگ میکروموسالگوریتم های ربات میکرو موسالگوریتم pledgeالگوریتم جستجوی تصادفیالگوریتم Bellman Flooding الگوریتم Tremauxچگونگی عملکرد الگوریتم بلدمننمایی از یک نمونه ماز مسابقات میکروموس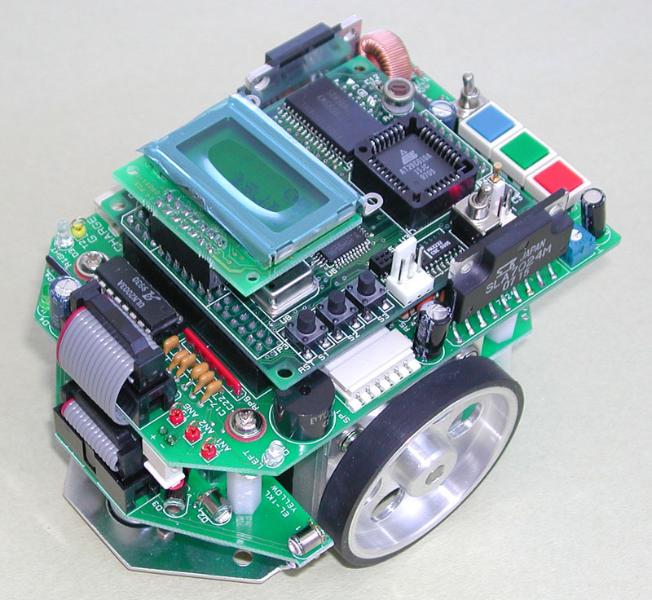
| | نسخه قابل چاپ | تعداد بازديد : 10 |
 |
| ما حصل این پروژه طراحی یک نوع پراب تماسی دو محوره ماشین های اندازه گیری مختصات می باشد که در فصل هشتم کلیه محاسبات لازم جهت طراحی پراب ارائه گردید. پراب های تماسی ماشین های اندازه گیری مختصات به سه دسته پراب های تماسی مقاومتی سینامتیکی، پراب های تماسی کرنش سنج و پراب های تماسی پیزو الکتریک تقسیم می شوند. پراب طراحی شده در فصل هشتم بر مبنای پراب های تماسی پیزو الکتریک می باشد که قادر است اندازه گیری را با دقت 0.01 mm انجام دهد. این بدان معناست که حداکثر انحراف نوک توپی پراب در یک راستای اندازه گیری (X یا Z) مقدار 0.01 mm می باشد. حسگر نیرویی پیزو الکتریک، یک سنسور نیرویی است که ورودی آن بصورت نیروی فشاری و خروجی آن تغییرات ولتاژ الکتریکی است. الکترونیک های پراب با اندازه گیری تغییرات ولتاژالکتریکی قادر به تشخیص نیروهای اعمال شده به ساختمان پراب هستند. این نوع سنسورها حساسیت بالایی به نیروهای اعمال شده به سوزن پراب دارند. در انتخاب سوزن و توپی پراب سعی شده است که هزینه ها حداقل گردد و همچنین طبق محاسبات انجام شده با فرض E = 196 KN/mm2 (برای مواد سوزن و توپی) حداکثر مقدار خمش (max€) بدست آمده 0.28 µm می باشد. در انتخاب فنر جهت مجموعه سینماتیکی سعی شد از فنری انتخاب گردد که حداکثر میزان انحراف سوزن از حالت قائم (θmax) 0.01° شود. ضریب ثابت فنر (K)، 1.2 N/mm و حداکثر میزان فشردگی آن 0.1 mm می باشد. طبق محاسبات انجام شده از سنسور پیزو الکتریکی باید استفاده شود که دامنه حساسیت آن بین دو نیروی FS1=0.12 وFS2= 0.06 نیوتن تغییر کند و به گونه ای برنامه ریزی شود که بازای نیروی FS1 کنترلر یک سیگنال ارسال نماید. از آنجایی که پراب های تماسی پیزو الکتریک مقدار پیش حرکت (PTV) خیلی کمی دارند (در پراب طراحی شده در فصل هشتم این مقدار 0.08 µm می باشد) لذا پیشنهاد می گردد که در آینده جهت ساخت یک نمونه واقعی از این نوع طرح استفاده شود.
پروژه مورد نظر مشتمل بر نه (9) فصل، 117 صفحه، تایپ شده، به همراه تصاویر رنگی، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:
فصل اول: (ماشین های اندازه گیری مختصات CMM)
مقدمه
اسکنینگ
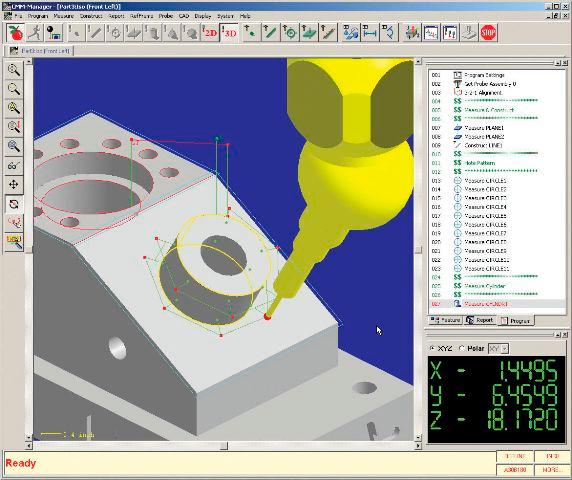
نرم افزارهای رایج در CMM
نرم افزار Axelنرم افزار Umessنرم افزار SUMنرم افزار ACEنرم افزار G-RAM, CON, G-AGEساختار ماشین های اندازه گیری مختصات
انواع ماشین های اندازه گیری مختصات
طره ایپلیستونیبازوی افقیچهار پایه ایانواع ماشین های اندازه گیری مختصات از نظر نوع حرکت
CMM Air BringCMM Roiler Bringپراب
پراب های تماسی (مکانیکی)پراب های غیر تماسی (نوری و لیزری)سوزن پراب تماسی
سوزن دیسکی
سوزن ستاره ایسوزن استوانه ایسوزن عقربه ایسوزن کروی تو خالیفصل دوم: (پراب مقاومتی سینماتیکی Touch Trigger)
مقدمه
سوئیچینگ الکتریکی
الزامات اساسی پراب Touch Trigger
تسلیمقابلیت تکرار مکانیکیقابلیت تکرار الکتریکیعملیات پراب مقاومتی سینماتیکی
فاکتورهایی از عملکرد پراب مقاومتی سینماتیکی
پیش حرکتتغییرات پیش حرکت (لوبینگ)تغییرات پیش حرکت XYZنتایج تجربیکالیبراسیون پرابقابلیت تکرارفرکانس نمونهقابلیت تکرار ارسالپسماند مغناطیسیطبقه بندی فاکتورهای عملکردی بر اساس اهمیت موضوع
قابلیت تکرارتغییرات پیش حرکتانعطاف پذیریپسماند مغناطیسیخلاصه
فصل سوم (پراب کرنش سنج سینماتیکی)
مقدمه
کرنش سنج
اندازه گیری نیروی تماسی
حسگر نیرو
سوئیچینگ نیمه هادی
اندازه گیری جابجایی با استفاده از کرنش سنج
عدم پذیرش محرک های غلط و اندازه گیری تکرار پذیر
تولید پراب به روش MEMS
قطعات مکانیکیچسبتست الکترونیکی سیم کشی و سنسورنتایج کالیبراسیون پراب
مزیت های عملکردی
مزیت های دوام و قابلیت اطمینان
انعطاف پذیری
خلاصه
فصل چهارم (پراب های پیزوالکتریک)
مقدمه
متعلقات اساسی سیستم
تحقق یک پراب دو بعدی
اندازه گیری زاویه و جابجایی با استفاده از واحد شبكه بندی دیود لیزریطراحی مکانیکینتایجتحقق یک سیستم پراب سه بعدی با استفاده از كرنش سنج مقاومتی پیزو
فصل پنجم (شناسایی خطاهای اسکن شده در پراب Touch Trigger)
تحلیل و مدلسازی
هدفطراحی، روش شناسی و رویکردیافته هامحدودیت ها و چکیده تحقیقمفاهیم کاربردیابتکار و ارزشمقدمه
خطای سیستماتیکخطای تصادفیپراب Touch Trigger
خطای نوک توپی پراب
خطای نوک توپی و خطای انحراف سوزن
نتایج
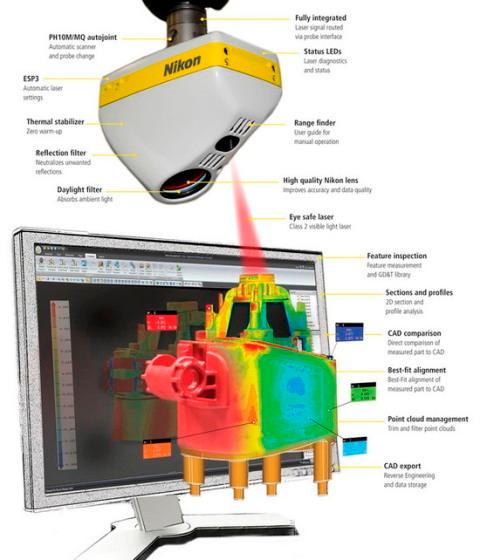
فصل ششم (پراب های غیر تماسی لیزری)
مقدمه
سیستم های اندازه گیری غیر تماسی نوری
سیستم های اسکن کننده و پراب های لیزری
پراب های نقطه ای لیزری
اسکنرهای لیزری خطی
ارائه یک راه حل بهینه
نتیجه
فصل هفتم (اندازه گیری بدون تماس از قطعات صنعتی مسطح با استفاده از تکنیک های پردازش تصویر دیجیتال)
مقدمه
ساختار کلی سیستم
کالیبراسیون
پردازش تصویر (تشخیص لبه)
پردازش قبل از عملیات تشخیص لبهپردازش بعد از عملیات تشخیص لبهحذف لبه های دور افتاده و تنهااتصال لبه های نزدیک به همپر کردن حفره های یک پیکسلی بوجود آمدهنازک کردن لبه ها یا استخراج اسکلتحذف شاخه های زائد بوجود آمدهبهبود منحنی لبه یا یک مرحله دیگر نازک کردنپیوند زدن تصاویر جزئیتبادل اطلاعات با سیستم های CAD
نتایج و جمع بندی
فصل هشتم (طراحی و مدلسازی پراب تماسی دو محوره ماشین اندازه گیری مختصات)
فصل نهم (نتیجه گیری)
منابع و مآخذ
جهت دانلود پروژه طراحی و مدلسازی پراب تماسی دو محوره ماشین اندازه گیری مختصات CMM بر لینک زیر کلیک نمایید:پروژه طراحی و مدلسازی پراب تماسی دو محوره ماشین اندازه گیری مختصات CMM
| | نسخه قابل چاپ | تعداد بازديد : 13 |
استخراج ویژگی های بافت و تشخیص خرابی بافت یکی از مفاهیم اصلی در پردازش تصویر و بینائی ماشین می باشد. هدف این پروژه آنالیز و کلاس بندی بافت های طبیعی و تصادفی تصاویر سطوح ورق های فولاد می باشد. پس از بررسی الگوریتم های آماری مختلف تحلیل بافت، یک روش جدید برای ترکیب ویژگی های بافت و رنگ معرفی می گردد. ما ویژگی های بافتی تصویر را با استفاده از یک روش جدید مبتنی بر الگوریتم LBP بدست می آوریم. یک فضای رنگی جدید معرفی خواهیم کرد و از این فضای رنگی برای بدست آوردن ویژگی های رنگی استفاده خواهیم کرد و درپایان یک روش جدید اولیه/ثانویه برای ترکیب ویژگی های بافتی و رنگی ارائه می گردد. برای کلاس بندی نیز از شبکه های عصبی مصنوعی استفاده می کنیم و در انتها فواید روش جدید را درمقایسه با روشهای معمول تحلیل بافت مورد بررسی قرار خواهیم داد.
پروژه مورد نظر مشتمل بر پنج (5) فصل، 102 صفحه، تایپ شده، به همراه تصاویر، جداول، نمودار، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:

فصل اول: بافت،تعریف و كاربرد آن
فصل دوم: بررسی الگوریتمهای تحلیل بافت وكلاسبندی
فصل سوم: آنالیز بافت با الگوهای دودوئی محلی(LBP)
مقدمهعملگر LBPیک روش یکنواخت برای آنالیز بافت LBP و توسعه های آنسرچشمه LBPتغییر ناپذیری با چرخش LBP با چند رزولوشن LBP رنگ های متضادخلاصه
فصل چهارم: آزمایشات کلاسبندی
فصل پنجم: معرفی روشی جدید برای کلاسبندی
مقدمهپیش پردازش تصاویرالگوریتم جدید مبتنی بر LBPفضای رنگی جدیدآزمایشاتروشی جدید برای ترکیب ویژگیهای رنگی و بافتینتیجه گیریجهت دانلود پروژه هوش مصنوعی - کاربرد روش های اکتشافی مبتنی بر تحلیل بافت در گروه بندی کیفی محصولات فولادی بر لینک زیر کلیک نمایید:
پروژه هوش مصنوعی - کاربرد روش های اکتشافی مبتنی بر تحلیل بافت در گروه بندی کیفی محصولات فولادی
| | نسخه قابل چاپ | تعداد بازديد : 20 |
تحقیق طراحی و مدلسازی پراب تماسی دو محوره ماشین اندازه گیری مختصات مشتمل بر سه (3) فصل، 48 اسلاید، تایپ شده، به همراه تصاویر رنگی، توسط مهندس نبی اله پلنگ سوار (جهت دفاعیه پایان نامه مقطع کارشناسی رشته مهندسی ساخت و تولید)، با فرمت Powerpoint جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:
فصل 1: ماشین اندازه گیری مختصات (CMM)
فصل 2: تکنولوژی پراب های تماسی Tough Trigger
فصل 3: طراحی و مدلسازی پراب تماسی دو محوره ماشین CMM

تحقیق با عنوان: طراحی و مدلسازی پراب تماسی دو محوره ماشین اندازه گیری مختصات CMM
| | نسخه قابل چاپ | تعداد بازديد : 9 |
در سال 1960 ماشین های اندازه گیری مختصات به عنوان ابزارهای قوی اندازه گیری مطرح شدند. با ظهور میکروپروسسورها سازندگان به قدرت واقعی ماشین های اندازه گیری مختصات پی بردند. با استفاده از این ماشین ها می توانید مختصات سه بعدی کامل یک قطعه را به دست آورید. وقتی که یک کامپیوتر به ماشین اندازه گیری مختصات وصل شود می تواند به طور اتوماتیک اندازه گیری های پیچیده را انجام داده و آن را با مشخصه های مورد انتظار از قطعه کار مقایسه کنید. به جای انجام اندازه گیری با وسایل اندازه گیری تک محوره (میکرومترها، کولیس ها، ارتفاع سنج و...) که وقت زیادی را هم می گیرند می توانید با استفاده از ماشین های اندازه گیری مختصات قطعه کارهای پیچیده را با دقت و سرعت بالا اندازه بگیرید...

تحقیق ماشین های اندازه گیری مختصات CMM مشتمل بر شش (6) بخش، 37 صفحه، تایپ شده، به همراه تصاویر رنگی، توسط مهندس نبی اله پلنگ سوار، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:
بخش 1: مقدمه
بخش 2: اسکنینگ و نرم افزارهای مرتبط با دستگاه های CMM
بخش 3: ساختار ماشین های اندازه گیری مختصات
بخش 4: انواع ماشین های اندازه گیری مختصات از نظر شکل و اندازه
بخش 5: انواع ماشین های اندازه گیری مختصات از نظر نوع حرکت
بخش 6: سوزن پراب تماسی

تحقیق با عنوان: ماشین های اندازه گیری مختصات CMM
| | نسخه قابل چاپ | تعداد بازديد : 9 |
با توسعه تکنولوژی ساخت قطعات صنعتی، نیاز به روش های اندازه گیری اتوماتیک و سریع در عین حال با حفظ دقت لازم احساس می شود. یکی از کارآمدترین این رهیافت ها استفاده از بینایی ماشین در اندازه گیری است. سیستم های بینایی ماشین که مبتنی بر روش های پردازش تصویر هستند در عین سادگی ابزار مورد نیاز، قادرند با استفاده از ترفندهای موثر نرم افزاری و الگوریتم های کارای موجود، به خصوص الگوریتم های تشخیص محل لبه، دقت سیستم را تا حد زیادی بالا ببرند.
از مزیت این روش ها، اندازه گیری بدون تماس است. روش های اندازه گیری که با قطعه تماس پیدا می کنند، در صورت کوچک بودن قطعه احتمال جابجا نمودن آن در اثر تماس وجود دارد که این امر موجب اختلال در اندازه گیری می گردد. به علاوه نرم یا صلب بودن قطعه ممکن است بر نتیجه اندازه گیری تاثیر بگذارد. حجم اطلاعات بدست آمده در مورد قطعه با روش های اندازه گیری مبتنی بر بینایی ماشین به مراتب بیشتر از حجم اطلاعات بدست آمده با روش های دیگر است...
تحقیق اندازه گیری بدون تماس از قطعات صنعتی مسطح با استفاده از تکنیک های پردازش تصویر دیجیتال مشتمل بر شش (6) بخش، 11 صفحه، تایپ شده، به همراه تصاویر رنگی، توسط مهندس سیدعلیرضا سیدین از دانشگاه فردوسی مشهد، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:
بخش 1: مقدمه
بخش 2: ساختار کلی سیستم
بخش 3: کالیبراسیون
بخش 4: پردازش تصویر (تشخیص لبه)
بخش 5: تبادل اطلاعات با سیستم CAD
بخش 6: نتایج و جمع بندی
تحقیق با عنوان: اندازه گیری بدون تماس از قطعات صنعتی مسطح با استفاده از تکنیک های پردازش تصویر دیجیتال
| | نسخه قابل چاپ | تعداد بازديد : 10 |
با پیشرفت سریع تكنیك اتوماسیون و پیچیده تر شدن پروسه های صنعتی و كاربرد روز افزون این شاخه از تكنیك نیاز شدیدی به كاربرد سنسورهای مختلف كه اطلاعات مربوط به عملیات تولید را درك و بر اساس این اطلاعات تصمیم مقتضی صادر گردد، احساس می شود. سنسورها به عنوان اعضای حسی یك سیستم، وظیفه جمع آوری و یا تبدیل اطلاعات را به صورتی كه برای یك سیستم كنترل و با اندازه گیری قابل تجزیه و تحلیل باشد به عهده دارند. در سال های اخیر سنسورها به صورت یك عنصر قابل تفكیك سیستم های مختلف صنعتی مورد استفاده قرار گرفته و پیشرفت سریعی در جهت جوابگویی به تقاضاهای صنعت در این شاخه از علم الكترونیك انجام پذیرفته است. سنسورها جهت تبدیل عوامل فیزیكی مانند حرارت، فشار، نیرو، طول، زاویه چرخش، دبی و غیره به سیگنال های الكتریكی به كار برده می شوند و به همین منظور سنسورهای مختلفی كه قابلیت تبدیل این عوامل را به جریان برق دارا می باشند، ساخته شده اند...

تحقیق سنسورها و اهمیت كاربرد آن (Sensors and Its importance)، مشتمل بر 80 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf گردآوری شده است.

تحقیق با عنوان: سنسورها و اهمیت كاربرد آن (Sensors and Its importance)
| | نسخه قابل چاپ | تعداد بازديد : 10 |
اتوماسیون در بخش های مختلف صنعت و كارهای تولیدی در چند دهه اخیر ظهور پیدا كرده است و روز به روز نیز در حال توسعه می باشد. بیش از چند دهه از ظهور كارخانجات كاملاً مكانیزه كه در آن ها تمامی پروسه ها اتوماتیك بوده و نیروی انسانی در آن نقش اجرائی ندارد، نمی گذرد. اما در چند سال اخیر شاهد بوجود آمدن كارخانجات مكانیزه ای بوده ایم كه طراحی، ساخت و نحوه كار آن ها واقعاً حیرت انگیز است. ایده و دانش كنترل اتوماتیك و استفاده از سیستم های مكانیزه در كارخانجات به جنگ جهانی دوم می رسد. اما تحولات عظیم و چشم گیر آن در سال های اخیر به وقوع پیوسته است. رُبات یا روبوت وسیلهای مکانیکی جهت انجام وظایف مختلف است. یک ماشین که میتواند برای عمل به دستورات مختلف برنامه ریزی گردد و یا یک سری اعمال ویژه انجام دهد. مخصوصا آن دسته از کارها که فراتر از حد تواناییهای طبیعی بشر باشند. این ماشین های مکانیکی برای بهتر به انجام رساندن اعمالی از قبیل احساس کردن، درک نمودن و جابجایی اشیا یا اعمال تکراری شبیه جوشکاری تولید میشوند.
اصول مهندسی موتورهای احتراق داخلی
ربات های هوشمند
مکانیک و کنترل در رباتیک
موتور ماشین

ربات مسیریاب رباتی است که می تواند در یک مسیر از قبل تعیین شده حرکت کند، این مسیر می تواند یک خط سیاه در زمینه سفید یا یک خط سفید در زمینه سیاه باشد. یا مخلوتی از هر دو باشد. ربات باید بتواند انواع مسیرهای موجود مانند پیچ، بریدگی، خطوط زاویه دار و مهم تر از همه حلقه را در کمترین زمان ممکن طی کند.
پروژه مورد نظر مشتمل بر 3 فصل، 73 صفحه، تایپ شده، به همراه تصاویر رنگی با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد: فصل اول به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک، انواع ربات ها، دسته بندی ربات ها پرداخته شده است. در فصل دوم کاربرد ربات ها و همچنین اجزاء ربات ها را مورد بررسی قرار داده شده و در فصل سوم، ساختن ربات مسیر یاب، شرح عملکرد ربات، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات مسیر یاب به طور کامل قرار داده شده است...
مدلسازی سیستم کروز کنترل در نرم افزار متلب
نقش و کاربرد انواع سنسورها در صنعت و بررسی سنسور پارک خودرو
طراحی و ساخت خودروهای برقی
مقدمه
فصل اول (ربات ها، تاریخچه و انواع آن ها):
رباتتعاریف رباتعلم رباتیکمزایای ربات هامعایب ربات هاتاریخچه ربات هادسته بندی ربات هادسته بندی اتحادیه ربات های ژاپندسته بندی موسسه رباتیک آمریکادسته بندی اتحادیه فرانسوی ربات های صنعتیانواع ربات ها ربات های متحرکربات همکارنانوباتطبقه بندی ربات هاطبقه بندی ربات ها از نظر کاربردربات های صنعتیربات های شخصی و علمیربات های نظامیطبقه بندی ربات ها از نظر استراتژی کنترلنسل اولنسل دومنسل سومنسل چهارمطبقه بندی ربات ها از نظر محرک مفصل هاسیستم های الکتریکیموتورهای DCموتورهای ACفصل دوم (کاربرد رباتها و اجزاء آنها)
کاربرد ربات هاربات آدم نمای اعلام خطرربات ها برای تقلید رفتار حیواناتربات تعقیب خطربات حس کننده تماسربات آبی، برای یافتن جعبه سیاه هواپیماربات پذیرشاجزاء اصلی یک رباتبازوی مکانیکی ماهرسنسورهاسنسورهای بدون تماسسنسورهای القائیکنترلرواحد تبدیل توانموتوردسته بندی کلی موتورهامحرک مفاصلفصل سوم (ربات مسیریاب)
ربات مسیریابربات مسیر یاب 7 سنسورشرح عملکرد ربات مسیر یابساختن ربات مسیر یابمدار ربات مسیر یاببرنامه ربات مسیر یابشکل ربات مسیر یاب 7 سنسورمنابع و ماخذ
جهت دانلود پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور) بر لینک زیر کلیک نمایید:
پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور)
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مکانیزم ها و دستگاه های مکانیکی
بررسی ربات میکروموس
كنترل روبات دو محوره با كنترل كننده ي فازي
سنسورها و اهميت كاربرد آن
مکاترونیک و رباتیک
موتور ماشین
اصول مهندسی موتورهای احتراق داخلی
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
موتورهای هواپیما (پیستونی، جت و ملخ)
| | نسخه قابل چاپ | تعداد بازديد : 16 |
امروزه روبات ها در انجام بسیاری از کارها به کمک انسان آمده و در برخی کارها نیز جایگزین آدمی گشته اند از جمله: کار در کارخانه، اکتشافات فضائی، جراحی و... به طور کلی روبات ها در کارهائی استفاده می شوند که خطرناک بوده (مثل نیروگاه های هسته ای)، مشکل و تکراری باشند (مثل اغلب کار کارخانه ها) و محیط های کثیف (مثل داخل لوله ها)...
طراحی و ساخت ربات مسيرياب هفت سنسور
تکنولوژی پیل سوختی
مکانیک و کنترل در رباتیک

تحقیق ربات های هوشمند (Intelligence Robot Project)، مشتمل بر 63 اسلاید، تایپ شده، به همراه تصاویر رنگی، مناسب برای کنفرانس های کلاسی دانش آموزی و دانشجویی رباتیک، توسط مهندس شرافت نیا از دانشگاه فردوسی مشهد، با فرمت Powerpoint جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید.
جهت دانلود تحقیق ربات های هوشمند (Intelligence Robot Project) برلینک زیر کلیک نمایید:
تحقیق با عنوان: ربات های هوشمند (Intelligence Robot Project)
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مکانیزم ها و دستگاه های مکانیکی
بررسی ربات میکروموس
كنترل روبات دو محوره با كنترل كننده ي فازي
سنسورها و اهميت كاربرد آن
مکاترونیک و رباتیک
موتور ماشین
اصول مهندسی موتورهای احتراق داخلی
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
موتورهای هواپیما (پیستونی، جت و ملخ)
| | نسخه قابل چاپ | تعداد بازديد : 13 |
کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering)، یک کتاب مفید و کاربردی از مهندسی رباتیک است که مشتمل بر 162 صفحه، 16 مقاله بین المللی به ثبت رسیده، به زبان فارسی، تایپ شده، به همراه تصاویر رنگی، نمودارها، روابط ریاضی و... با فرمت PDF، مفید برای دانشجویان رشته های مهندسی رباتیک، مکانیک، برق و الکترونیک، کامپیوتر و... که به ترتیب زیر گردآوری شده است:
مقاله 1: برنامه ریزی و شبیه سازی جوشکاری رباتیک اتصالات روی هم افقی ورق ها در GMAWمقاله 2: آموزش سیستم بینایی ربات فوتبالیست با استفاده از شبکه های عصبیمقاله 3: استفاده از تصاویر استریو برای ناوبری ربات سیارمقاله 4: تحلیل دینامیکی و طراحی حرکتی یک ربات خزنده بر روی سطح شیبدارمقاله 5: تحلیل دینامیکی یک روبات ماشین کار به روش NOCمقاله 6: کنترل تطبیقی ربات به همراه اصطکاک در اتصالاتمقاله 7: کنترل کننده ناظر تطبیقی در سیستم های رباتیک مشتمل بر چند بازومقاله 8: طراحی گریپر جهت نصب رباتیک شیشه خودرومقاله 9: کنترل هوشمند موقعیت ربات در جابجایی اجساممقاله 10: ربات هوشمند حل کننده پازل عددی با قابلیت تعریف ماموریت های جدیدمقاله 11: ربات تعقیب کننده مسیر به همراه موقعیت یاب محلیمقاله 12: مدل سازی سینماتیکی و بررسی عملکرد ربات متحرک سه چرخهمقاله 13: طراحی، شبیه سازی و ساخت ربات آدم نمای آریامقاله 14: تقویت کننده های عملیاتی و مقایسه کننده هامقاله 15: ربات تعقیب خط بدون استفاده از میکرو کنترلرهامقاله 16: طراحی بدنه و شاسی ربات جنگندهطراحی و ساخت ربات مسيرياب هفت سنسور
ربات های هوشمند
مکانیک و کنترل در رباتیک

جهت دانلود کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering) بر لینک زیر کلیک نمایید:
کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering)
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مکانیزم ها و دستگاه های مکانیکی
بررسی ربات میکروموس
كنترل روبات دو محوره با كنترل كننده ي فازي
سنسورها و اهميت كاربرد آن
مکاترونیک و رباتیک
موتور ماشین
اصول مهندسی موتورهای احتراق داخلی
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
موتورهای هواپیما (پیستونی، جت و ملخ)
| | نسخه قابل چاپ | تعداد بازديد : 13 |