جزوه آموزش محیط طراحی سطح پیشرفته Generative Shape Design کتیا CATIA یک جزوه مفید، کامل و کاربردی از آموزش سطح سازی پیشرفته کتیا است که مشتمل بر 226 صفحه، در 8 فصل، تایپ شده، به زبان انگلیسی خیلی روان و به همراه تصاویر رنگی، توسط شرکت سازنده نرم افزار کتیا (Dassualt Systems) به ترتیب زیر گردآوری شده است:
فصل 1: طراحی و مدلسازی دستگیره (Knob)
طراحی، مدلسازی و مهندسی معکوس هواپیما بوئینگ در نرم افزار کتیا
از کتیا بیشتر بدانیم
طراحی و مدلسازی ورقکاری در نرم افزار کتیا
در فصل اول از این مجموعه آموزشی، طراحی و مدلسازی دستگیره (Knob) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Creating the Wireframe Geometry
Step 2: Creating the Basic Surfaces
Step 3: Performing Operations the Basic Surfaces
Step 4: Analyzing and Modifying the draft angle
Step 5: Offsetting a solid
فصل 2: Wireframe Recapitulation Exercise
فصل 3: Surface Recapitulation Exercise
فصل 4: Operation Recapitulation Exercise
فصل 5: Advanced Tasks Recapitulation Exercise
فصل 6: طراحی و مدلسازی بطری پلاستیکی (Plastic Bottle)
طراحی پارامتریک چرخ دنده ساده با استفاده از فرمول نویسی در نرم افزار کتیا
مدلسازی، سطح سازی، شبیه سازی در نرم افزار کتیا
طراحی و مونتاژ گیربکس حلزونی در نرم افزار کتیا

در فصل ششم از این مجموعه آموزشی، طراحی و مدلسازی بطری پلاستیکی (Plastic Bottle) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Bottle Bottom Creation
Step 2: Bottle Body Creation
Step 3: Bottleneck
Step 4: Assemble the three bodies
Step 5 : Create the Bottleneck Screw
فصل 7: طراحی و مدلسازی پایه موس فضایی (Space Mouse Base)
طراحی و آنالیز چرخدنده مارپیچ در نرم افزار کتیا
طراحی، مدلسازی، سطح سازی، آنالیز و تحلیل در نرم افزار کتیا
طراحی و مدلسازی بدنه خودرو آئودی آر8 در نرم افزار کتیا

در فصل هفتم از این مجموعه آموزشی، طراحی و مدلسازی پایه موس فضایی (Space Mouse Base) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Create the Filleted pad
Step 2: Create the surfacic elements
Step 3: Sew the surface on the Pad
Step 4: Create the Groove
Step 5: Split the solid with an imported surface
Step 6: Shell the created solid
Step 7: Create the Shaft
Step 8: Create the Holes and Pockets
Step 9: Assemble a new body
فصل 8: طراحی و مدلسازی آبلیمو گیر (Lemon Squeezer)
طراحی و مدلسازی، آنالیز و ماشینکاری خودرو مسابقه ای در نرم افزار کتیا
آموزش بی نظیر نرم افزار کتیا
پردازش ابر نقاط و مهندسی معکوس در نرم افزار کتیا
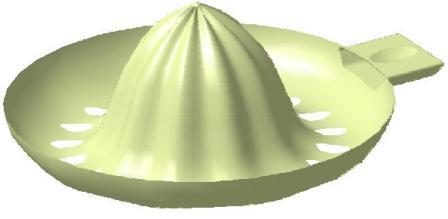
در فصل هشتم از این مجموعه آموزشی، طراحی و مدلسازی آبلیمو گیر (Lemon Squeezer) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Completing the wireframe elements
Step 2: Creating the basic surfaces
Step 3: Creating a blend surface with coupling and adding the handle
Step 4: Creating filtering holes
* توجه: کاربران نگران زبان انگلیسی جزوات نباشند. حتی کاربرانی که سر انگشتی زبان انگلیسی یاد دارند قادر خواهند بود از این جزوات به عنوان تمرین های عملی پیشرفته بهره لازم را ببرند، زیرا همان طور که در هر فصل در بالا مشخص نمودیم، مدل سازی قطعات به صورت پله پله (Step to Step) همراه با تصاویر واضح بوده و کاربر فقط کافی است از قبل یک آشنایی کلی با دستورات محیط Part Design داشته که قبلا از طریق همین سایت نیز محیط مدل سازی سه بعدی کتیا (Part Design) به صورت کامل آموزش داده شده است.
جزوه با فرمت PDF بوده و به راحتی بر روی گوشی های اندروید و کامپیوتر قابل استفاده می باشد.
جهت دانلود جزوه آموزش محیط طراحی سطح پیشرفته Generative Shape Design کتیا CATIA بر لینک زیر کلیک نمایید:
آموزش کتیا، جزوه آموزش محیط طراحی سطح پیشرفته Generative Shape Design نرم افزار کتیا CATIA
اگر به فراگیری مباحث مشابه مطلب بالا
علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند
طراحی، مدلسازی و مونتاژ عینک در نرم افزار کتیا
طراحی و مدلسازی موس کامپیوتر در نرم افزار کتیا
طراحی، تحلیل و بهینه سازی سبد سرخ کن در نرم افزار کتیا
طراحی و مدلسازی فنر با گام متغیر در نرم افزار کتیا
طراحی و مدلسازی بدنه هواپیما در نرم افزار کتیا
طراحی و مدلسازی بطری آب در نرم افزار کتیا
طراحی و مدلسازی توپ در نرم افزار کتیا
طراحی و مدلسازی حلقه پیچیده در نرم افزار کتیا
طراحی و مدلسازی شیشه عطر در نرم افزار کتیا
| | نسخه قابل چاپ | تعداد بازديد : 65 |
 |
|
اتوماسیون در بخش های مختلف صنعت و كارهای تولیدی در چند دهه اخیر ظهور پیدا كرده است و روز به روز نیز در حال توسعه می باشد. بیش از چند دهه از ظهور كارخانجات كاملاً مكانیزه كه در آن ها تمامی پروسه ها اتوماتیك بوده و نیروی انسانی در آن نقش اجرائی ندارد، نمی گذرد. اما در چند سال اخیر شاهد بوجود آمدن كارخانجات مكانیزه ای بوده ایم كه طراحی، ساخت و نحوه كار آن ها واقعاً حیرت انگیز است. ایده و دانش كنترل اتوماتیك و استفاده از سیستم های مكانیزه در كارخانجات به جنگ جهانی دوم می رسد. اما تحولات عظیم و چشم گیر آن در سال های اخیر به وقوع پیوسته است. رُبات یا روبوت وسیلهای مکانیکی جهت انجام وظایف مختلف است. یک ماشین که میتواند برای عمل به دستورات مختلف برنامه ریزی گردد و یا یک سری اعمال ویژه انجام دهد. مخصوصا آن دسته از کارها که فراتر از حد تواناییهای طبیعی بشر باشند. این ماشین های مکانیکی برای بهتر به انجام رساندن اعمالی از قبیل احساس کردن، درک نمودن و جابجایی اشیا یا اعمال تکراری شبیه جوشکاری تولید میشوند.
اصول مهندسی موتورهای احتراق داخلی
ربات های هوشمند
مکانیک و کنترل در رباتیک
موتور ماشین

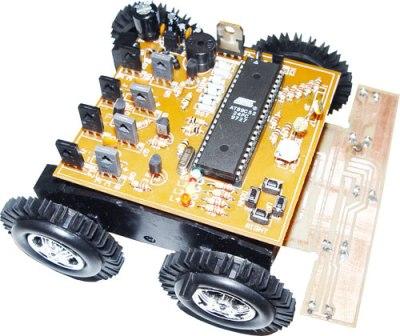
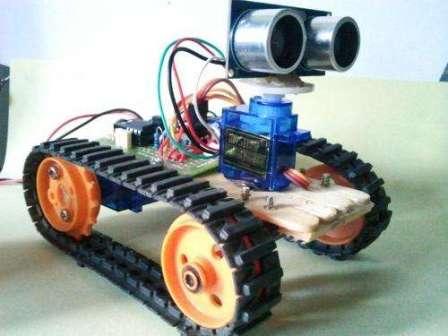
ربات مسیریاب رباتی است که می تواند در یک مسیر از قبل تعیین شده حرکت کند، این مسیر می تواند یک خط سیاه در زمینه سفید یا یک خط سفید در زمینه سیاه باشد. یا مخلوتی از هر دو باشد. ربات باید بتواند انواع مسیرهای موجود مانند پیچ، بریدگی، خطوط زاویه دار و مهم تر از همه حلقه را در کمترین زمان ممکن طی کند.
پروژه مورد نظر مشتمل بر 3 فصل، 73 صفحه، تایپ شده، به همراه تصاویر رنگی با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد: فصل اول به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک، انواع ربات ها، دسته بندی ربات ها پرداخته شده است. در فصل دوم کاربرد ربات ها و همچنین اجزاء ربات ها را مورد بررسی قرار داده شده و در فصل سوم، ساختن ربات مسیر یاب، شرح عملکرد ربات، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات مسیر یاب به طور کامل قرار داده شده است...
مدلسازی سیستم کروز کنترل در نرم افزار متلب
نقش و کاربرد انواع سنسورها در صنعت و بررسی سنسور پارک خودرو
طراحی و ساخت خودروهای برقی
مقدمه
فصل اول (ربات ها، تاریخچه و انواع آن ها):
رباتتعاریف رباتعلم رباتیکمزایای ربات هامعایب ربات هاتاریخچه ربات هادسته بندی ربات هادسته بندی اتحادیه ربات های ژاپندسته بندی موسسه رباتیک آمریکادسته بندی اتحادیه فرانسوی ربات های صنعتیانواع ربات ها ربات های متحرکربات همکارنانوباتطبقه بندی ربات هاطبقه بندی ربات ها از نظر کاربردربات های صنعتیربات های شخصی و علمیربات های نظامیطبقه بندی ربات ها از نظر استراتژی کنترلنسل اولنسل دومنسل سومنسل چهارمطبقه بندی ربات ها از نظر محرک مفصل هاسیستم های الکتریکیموتورهای DCموتورهای ACفصل دوم (کاربرد رباتها و اجزاء آنها)
کاربرد ربات هاربات آدم نمای اعلام خطرربات ها برای تقلید رفتار حیواناتربات تعقیب خطربات حس کننده تماسربات آبی، برای یافتن جعبه سیاه هواپیماربات پذیرشاجزاء اصلی یک رباتبازوی مکانیکی ماهرسنسورهاسنسورهای بدون تماسسنسورهای القائیکنترلرواحد تبدیل توانموتوردسته بندی کلی موتورهامحرک مفاصلفصل سوم (ربات مسیریاب)
ربات مسیریابربات مسیر یاب 7 سنسورشرح عملکرد ربات مسیر یابساختن ربات مسیر یابمدار ربات مسیر یاببرنامه ربات مسیر یابشکل ربات مسیر یاب 7 سنسورمنابع و ماخذ
جهت دانلود پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور) بر لینک زیر کلیک نمایید:
پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور)
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مکانیزم ها و دستگاه های مکانیکی
بررسی ربات میکروموس
كنترل روبات دو محوره با كنترل كننده ي فازي
سنسورها و اهميت كاربرد آن
مکاترونیک و رباتیک
موتور ماشین
اصول مهندسی موتورهای احتراق داخلی
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
موتورهای هواپیما (پیستونی، جت و ملخ)
| | نسخه قابل چاپ | تعداد بازديد : 16 |
امروزه روبات ها در انجام بسیاری از کارها به کمک انسان آمده و در برخی کارها نیز جایگزین آدمی گشته اند از جمله: کار در کارخانه، اکتشافات فضائی، جراحی و... به طور کلی روبات ها در کارهائی استفاده می شوند که خطرناک بوده (مثل نیروگاه های هسته ای)، مشکل و تکراری باشند (مثل اغلب کار کارخانه ها) و محیط های کثیف (مثل داخل لوله ها)...
طراحی و ساخت ربات مسيرياب هفت سنسور
تکنولوژی پیل سوختی
مکانیک و کنترل در رباتیک

تحقیق ربات های هوشمند (Intelligence Robot Project)، مشتمل بر 63 اسلاید، تایپ شده، به همراه تصاویر رنگی، مناسب برای کنفرانس های کلاسی دانش آموزی و دانشجویی رباتیک، توسط مهندس شرافت نیا از دانشگاه فردوسی مشهد، با فرمت Powerpoint جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید.
جهت دانلود تحقیق ربات های هوشمند (Intelligence Robot Project) برلینک زیر کلیک نمایید:
تحقیق با عنوان: ربات های هوشمند (Intelligence Robot Project)
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مکانیزم ها و دستگاه های مکانیکی
بررسی ربات میکروموس
كنترل روبات دو محوره با كنترل كننده ي فازي
سنسورها و اهميت كاربرد آن
مکاترونیک و رباتیک
موتور ماشین
اصول مهندسی موتورهای احتراق داخلی
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
موتورهای هواپیما (پیستونی، جت و ملخ)
| | نسخه قابل چاپ | تعداد بازديد : 13 |
کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering)، یک کتاب مفید و کاربردی از مهندسی رباتیک است که مشتمل بر 162 صفحه، 16 مقاله بین المللی به ثبت رسیده، به زبان فارسی، تایپ شده، به همراه تصاویر رنگی، نمودارها، روابط ریاضی و... با فرمت PDF، مفید برای دانشجویان رشته های مهندسی رباتیک، مکانیک، برق و الکترونیک، کامپیوتر و... که به ترتیب زیر گردآوری شده است:
مقاله 1: برنامه ریزی و شبیه سازی جوشکاری رباتیک اتصالات روی هم افقی ورق ها در GMAWمقاله 2: آموزش سیستم بینایی ربات فوتبالیست با استفاده از شبکه های عصبیمقاله 3: استفاده از تصاویر استریو برای ناوبری ربات سیارمقاله 4: تحلیل دینامیکی و طراحی حرکتی یک ربات خزنده بر روی سطح شیبدارمقاله 5: تحلیل دینامیکی یک روبات ماشین کار به روش NOCمقاله 6: کنترل تطبیقی ربات به همراه اصطکاک در اتصالاتمقاله 7: کنترل کننده ناظر تطبیقی در سیستم های رباتیک مشتمل بر چند بازومقاله 8: طراحی گریپر جهت نصب رباتیک شیشه خودرومقاله 9: کنترل هوشمند موقعیت ربات در جابجایی اجساممقاله 10: ربات هوشمند حل کننده پازل عددی با قابلیت تعریف ماموریت های جدیدمقاله 11: ربات تعقیب کننده مسیر به همراه موقعیت یاب محلیمقاله 12: مدل سازی سینماتیکی و بررسی عملکرد ربات متحرک سه چرخهمقاله 13: طراحی، شبیه سازی و ساخت ربات آدم نمای آریامقاله 14: تقویت کننده های عملیاتی و مقایسه کننده هامقاله 15: ربات تعقیب خط بدون استفاده از میکرو کنترلرهامقاله 16: طراحی بدنه و شاسی ربات جنگندهطراحی و ساخت ربات مسيرياب هفت سنسور
ربات های هوشمند
مکانیک و کنترل در رباتیک

جهت دانلود کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering) بر لینک زیر کلیک نمایید:
کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering)
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مکانیزم ها و دستگاه های مکانیکی
بررسی ربات میکروموس
كنترل روبات دو محوره با كنترل كننده ي فازي
سنسورها و اهميت كاربرد آن
مکاترونیک و رباتیک
موتور ماشین
اصول مهندسی موتورهای احتراق داخلی
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
موتورهای هواپیما (پیستونی، جت و ملخ)
| | نسخه قابل چاپ | تعداد بازديد : 13 |
المانهای محدود و اجسام صلب مؤلفه های اساسی یک مدل آباکوس (ABAQUS) هستند. المانهای محدود شکل پذیر هستند در حالی که اجسام صلب بدون تغییر شکل در فضا حرکت میکنند. اگر چه کاربران برنامه های تحلیل اجزای محدود ممکن است شناختی از ماهیت المانهای محدود داشته باشند، مفهوم عمومی اجسام صلب در یک برنامه اجزای محدود ممکن است تا حدودی جدید باشد.
آموزش کاربردی نرم افزار آباکوس
آموزش مقدماتی نرم افزار آباکوس
راهنمای آباکوس برای کتیا
برای افزایش بازده محاسباتی، برنامه آباکوس (ABAQUS) تواناییهای عمومی در مورد مدلسازی اجسام صلب دارد. هر جسم یا بخشی از آن را میتوان به صورت جسم صلب تعریف نمود. بیشتر انواع المان میتواند برای تعریف اجسام صلب مورد استفاده قرار گیرد. مزیت اجسام صلب نسبت به اجسام شکل پذیر این است که اجسام صلب تنها دارای شش درجه آزادی در یک گره مرجع که برای آن جسم صلب تعریف شده، هستند. برعکس، المانهای شکل پذیر درجات آزادی متعددی دارند که برای محاسبه تغییر شکل آنها محاسبات زیادی باید انجام شود. وقتی که این تغییر مکانها قابل صرف نظر کردن باشند و یا برای کاربر مهم نباشند، مدل سازی جسم به صورت صلب به طور قابل ملاحظه ای از حجم محاسبات میکاهد بدون آنکه بر دقت نتایج خروجی تأثیری داشته باشد.
شبیه سازی فرآیند کشش عمیق ورق در نرم افزار آباکوس
تحلیل صفحه کامپوزیتی تحت تنش کششی در نرم افزار آباکوس
مدل سازي مواد پیزوالکتریک در نرم افزار تحلیلی آباکوس
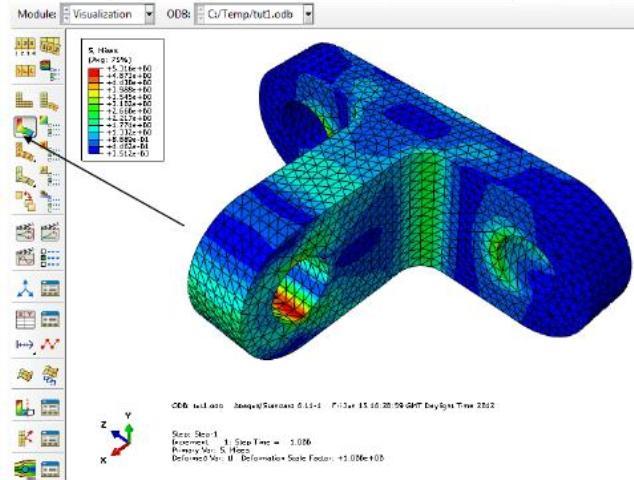
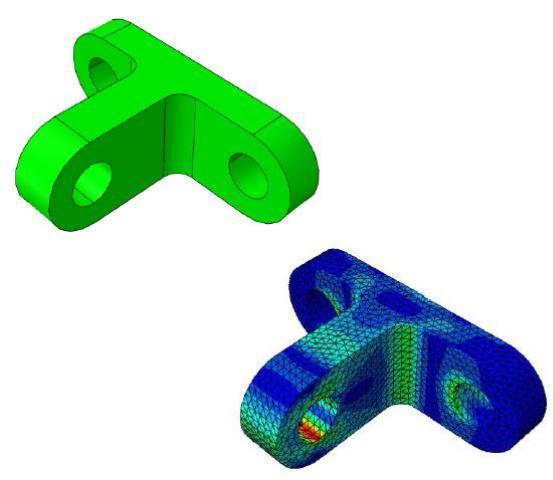
* جزوه آموزش تحلیل قلاب در نرم افزار آباکوس (Bracket Analysis in Abaqus)
مشتمل بر 18 صفحه، به زبان انگلیسی روان، آموزش در هر مرحله به همراه
تصویر، با فرمت PDF گردآوری شده است. در فایل آموزشی بصورت گام به گام به
تحلیل قلاب پرداخته شده است. در این آموزش از نحوه وارد کردن (Import) قطعه
و انتخاب جنس و مش بندی شروع و به خرجی گرفتن در Abaqus می انجامد.
جهت دانلود جزوه آموزش تحلیل قلاب در نرم افزار آباکوس (Bracket Analysis in Abaqus) برلینک زیر کلیک نمایید:
آموزش آباکوس، جزوه آموزش تحلیل قلاب در نرم افزار آباکوس (Bracket Analysis in ABAQUS)
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
تحلیل فرآیند فورج یک بلیت با نرم افزار آباکوس
تحلیل اجزاء محدود خرپای فضایی با نرم افزار آباکوس
بررسي فرآيند كشش عميق به كمك نرم افزار المان محدود آباکوس
تحلیل جابجایی صفحه سوراخ دار با نرم افزار آباکوس
شبیه سازی برخورد سنبه با ورق با نرم افزار آباکوس
تحلیل خزش سیستم لوله و سیلندر با نرم افزار آباکوس
طراحی و مدلسازی تیر آهن در نرم افزار آباکوس
تحلیل تیر دو سر گیردار به صورت سه بعدی در نرم افزار آباکوس
| | نسخه قابل چاپ | تعداد بازديد : 29 |
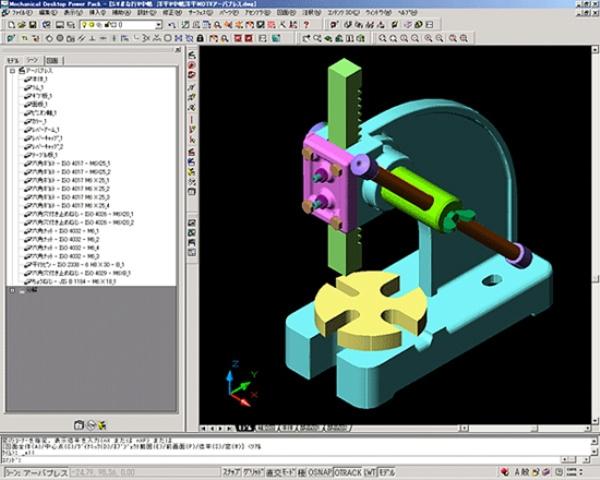
نرم افزار Mechanical Desktop كه به اختصار MTD خوانده می شود، نرم افزار بسیار مؤثر و دارای توانایی های منحصر به فردی در طراحی قطعات نامعین و طراحی قطعات معین می باشد. این نرم افزار توسط شركت Autodesk پشتیبانی شده است و چندین سال پیش ابتدایی ترین نرم افزار آن تحت نام MDT2 روانه بازار شد. به همراه تكمیل شدن نرم افزار AutoCAD هنگامی كه این نرم افزار به نسخه 12 رسید مبحث جدیدی تحت عنوان AMD (ساخت احجام Solid) مورد توجه خاص شركت Autodesk قرار گرفت كه بعد از آن MDT2 ارائه شد كه بسیار ضعیف بود. اما با تكمیل علم و دانش این نرم افزار در نسخه 4 دارای بخش بسیار جالبی تحت عنوان طراحی قطعات استاندارد و محاسبات مهندسی ارائه شد. همچنین این نرم افزار به برنامه جانبی Mechanical Desktop Power Pack مجهز شده كه بسیار جالب و قوی می باشد كه دارای قابلیت های بسیار جالبی از جمله:
طراحی و ویرایش طراحی به طور همزمانایجاد وآنالیزسطوح (Surface) به صورت بسیار قوی انجام طراحی قطعات استاندارد از قبیل پیچ، مهره، واشر، بادامك و...مجموعه نقشه ها جهت تمرین و ترسیم با نرم افزارهای طراحی
بلوپرینت و نقشه های آماده جهت طراحی و مدلسازی سه بعدی خودرو
نرم افزار تهیه مدل سیلندرهای هیدرولیک برای نرم افزارهای طراحی
خصوصیات این مجموعه در این است كه مباحث پیشرفته و كاربردی را شامل می شود و از قسمت ابتدایی آن (Part Modeling) چشم پوشی كرده است و مباحث پیشرفته از قبیل تحلیل تنش و ساخت قطعات معین در Pack Power را شامل می شود. نرم افزار MDT یك نرم افزار مدل سازی سه بعدی پارامتری است كه امكانات ویژه ای برای طراحی قطعات و مجموعه های مكانیكی و همچنین تولید نقشه از این طرح ها را دارد. امروزه رایانه به ابزار قدرتمند و جدایی ناپذیر در امور صنعت و محاسبات پیچیده علمی مبدل شده است و نمی توان به راحتی و بدون استفاده از آن به حركات علمی و صنعتی ادامه داد. این ابزار قدرتمند خود نیز در سیطره پیشرفت پرشتاب زمان قرار گرفته است و با سرعت و شتاب بسیار بالا قلمرو نفوذ خود را گسترش می دهد. از جمله موارد استفاده از رایانه در مراحل طراحی و تولید قطعه (CAD/CAM/CAE) می باشد. در طراحی و تولید قطعات صنعتی از نرم افزارهای مدل سازی سه بعدی زیر استفاده می شود: ProEngeenier ,Catia ,MechanicalDesktop Solidwork در این پروژه تلاش شده است كه با به كار گرفتن تصاویر، جداول، دستورات مختلف و مدلینگ و اسمبل قطعات یك سیلندر پیستون هیدرولیك، یك آشنایی کلی از ابن نرم افزار ارائه شود تا كسانی كه علاقه مند به فراگیری این نرم افزار هستند با اصول و مقدمات این نرم افزار آشنا شوند. البته این نكته قابل توجه است كه كسانی كه مایل به فراگیری این نرم افزار هستند باید قبل از این یك آشنایی هرچند مختصر با Autocad داشته باشند كه این امر باعث می شود تادر امر فراگیری نرم افزار مکانیکال موفق تر باشند...
آموزش کاربردی نرم افزار مکانیکال دسکتاپ - جلد اول
آموزش کاربردی نرم افزار مکانیکال دسکتاپ - جلد دوم
مونتاژ سیستم تعلیق خودرو در نرم افزار اتودسک اینونتور
پروژه مورد نظر مشتمل بر چهار (4) فصل، 77 صفحه، تایپ شده، به همراه تصاویر رنگی هر محیط، نوار ابزارها و دستورات، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:
فصل 1:
مقدمهتاریخچه نرم افزارآشنایی با محیط كارMDTروش های دست یابی به فرمان هامرورگرفیلتر مرورگركادر محاوره ای Mechanical Optionفصل 2:
پروفیل هاشرایط پروفیل هاتولید پروفیل از طرح اولیهقیود هندسیفصل 3:
طرح های كاریصفحه ترسیمصفحات كاریمحورهای كارینقاط كاریفصل 4:
مفهوم طرحتولید حجم به روش برجسته كردنفرمان AMEXTRUDEتولید حجم به روش جاروب كردن مسیرمسیرهای دو بعدیفرمان AMSWEEPمسیرهای سه بعدیمسیرهای سه بعدی حلزونیمسیرهای منحنی سه بعدیمسیرهای سه بعدی لولهمسیر های لبه سه بعدی قطعاتتولید حجم های دارای محور تقارنفرمان AMREVOLVEتولید حجم با تغییر شكل مقطعفرمان AMLOFTشرایط لازم برای مقاطع
آموزش مقدماتی تا پیشرفته نرم افزار اتودسک اینونتور
آموزش مدلسازی، مونتاژ، ورقکاری، نقشه کشی، شبیه سازی نرم افزار اتودسک اینونتور
مجموعه فایل های ویدیوئی آموزشی نرم افزار اتودسک اینونتور
همچنین این پروژه می تواند یک منبع مناسب جهت علاقمندان به طراحی کامپیوتر با نرم افزار Mechanical Desktop باشد.
جهت دانلود
پروژه طراحی و مدل سازی
قطعات دستگاه با استفاده از نرم افزار مکانیکال دسکتاپ Mechanical Desktop
بر لینک زیر کلیک نمایید:
پروژه طراحی و مدل سازی قطعات دستگاه با استفاده از نرم افزار مکانیکال دسکتاپ Mechanical Desktop
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
نقشه کشی به کمک اتوکد
محاسبه حجم عملیات خاکبرداری و خاکریزی با نرم افزار اتوکد لند
پروژه توسعه زمین و طراحی عمرانی
نرم افزار توسعه زمین و طراحی عمرانی
اتوکد سیویل سه بعدی
رازهایی که هر کاربر بایستی درباره نرم افزار اتوکد بداند
3D Printing with Autodesk 123D
آموزش مقدماتی تا پیشرفته نرم افزار اتوکد
طراحی و مدلسازی پیچ گوشتی در نرم افزار اتوکد
| | نسخه قابل چاپ | تعداد بازديد : 16 |
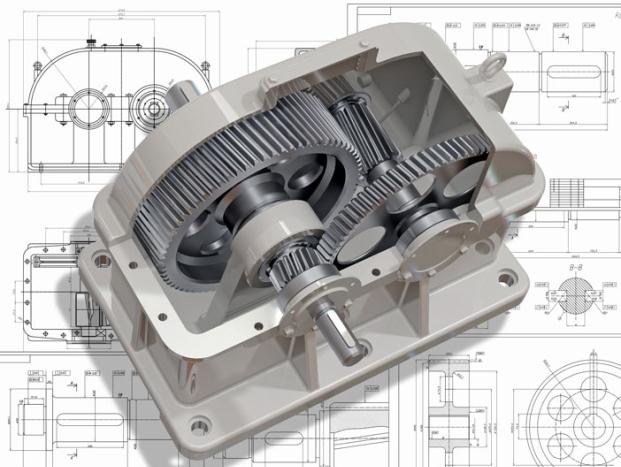
در اغلب ماشین ها و دستگاه های صنعتی رفتار و حرکات هماهنگ و هدف دار مجموعه ی اجزاء و اعضاء، سیستمی دینامیکی را ایجاد می کند، که مهندس طراح در اولین گام گریزی به جز تجزیه و تحلیل حرکت ها و نیروها در آن را ندارد. از طریق این مرحله است که نهایتا به فازهای بهینه سازی و طراحی و استاندارد سازی و ... دسترسی می یابد. در تحلیل سیستم های دینامیکی اعتبار نتایج بستگی مستقیم به میزان بالا بودن دقت و پرهیز از فرضیات ساده کننده در مدل سازی دارد. دستیابی به نتایجی معتبر و اطمینان از محصولات مربوط به آن به جز از طریق بکارگیری نرم افزارهای صنعتی پیشرفته، بسیار سخت، پرهزینه و چه بسا در شرایط رقابت جهانی صنعت غیر ممکن است.
نرم افزار بهینه سازی شکل قطعات مکانیکی (AIMAS)
مش بندی حرفه ای و دقیق با نرم افزار هایپرمش
یادگیری مقدماتی نرم افزار آدامز
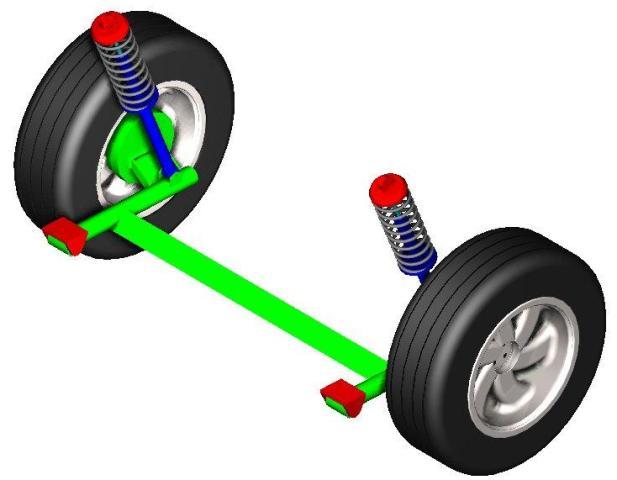
یکی از این نرم افزارهای پر استفاده در صنعت که در شبیه سازی های دینامیکی بکار می رود نرم افزار ADAMS می باشد که در این پروژه ابتدا شرح مختصری از سیستم تعلیق و اجزای آن داه می شود و سپس همه ی بخش های نرم افزار معرفی می شود و پس از آن بخش ADAMS/ CAR بطور کامل شرح داده می شود، که شامل طراحی و ساخت سیستم تعلیق و فرمان جلوی خودروی مزدا i1600 و Bi2000 و سپس تست آن مطابق با شرایط تست های استاندارد می باشد.
پروژه مورد نظر مشتمل بر 136 صفحه، تایپ شده، به همراه تصاویر رنگی، تشریح نوار ابزارها و دستورات نرم افزار ADAMS، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید.
همچنین این پروژه می تواند یک منبع مناسب جهت علاقمندان به آنالیز مهندسی با نرم افزار ADAMS باشد.
آموزش کامل شبیه سازی آدامز مقدماتی
مونتاژ سیستم تعلیق خودرو در نرم افزار اتودسک اینونتور
بررسی و آشنایی با انواع فنربندی و سیستم تعلیق خودرو

جهت دانلود پروژه شبیه سازی و آنالیز
سیستم تعلیق و فرمان خودرو با نرم افزار آدامس ADAMS/car بر لینک زیر کلیک نمایید:
پروژه شبیه سازی و آنالیز سیستم تعلیق و فرمان خودرو با نرم افزار آدامس ADAMS/car
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
روش طراحی انواع کمک فنرها
معرفی و بررسی انواع سیستم های ترمز خودرو
طراحی و انتخاب کلاچ ها و ترمزها
اصول مهندسی انواع سیستم های تعلیق و محرک
سیستم تعلیق خودرو برای یک چرخ
طراحی و مونتاژ موتور چهار سیلندر در نرم افزار سالیدورکس
اصول مهندسی موتورهای احتراق داخلی
موتور ماشین
موتورهای احتراق داخلی
| | نسخه قابل چاپ | تعداد بازديد : 14 |