بر خلاف سیستم انتقال قدرت اتوماتیک، در سیستم انتقال قدرت با قابلیت تغییر پیوسته، جعبه دنده ای با تعداد مشخص چرخ دنده وجود ندارد، یعنی در CVT چرخ دنده های دندانه دار درگیر با هم وجود ندارند. رایج ترین نوع CVT بر اساس سیستم پولی کار می کند که اجازه ی بینهایت تغییر بین بالاترین و پایین ترین دنده بدون گسستگی را می دهد. اگر از اینکه چرا درباره ی CVT هم از واژه دنده استفاده می شود تعجب می کنید به خاطر بیاورید که منظور از دنده نسبت سرعت موتور به سرعت محور چرخ ها می باشد.
فلایویل
کلاچ
سیستم انتقال قدرت پیوسته

اگرچه CVT این نسبت را بدون استفاده از چرخ دنده های سیاره ای انجام می دهد اما باز هم از واژه دنده برای CVT استفاده می شود. بیشتر CVT ها فقط سه جزء اساسی دارند:
یک تسمه محکم فلزی یا لاستیکییک پولی متغییر محرک (ورودی)یک پولی خروجیبه علاوه CVT ها انواع مختلفی از ریزپردازنده ها و حسگر ها را دارا می باشند، اما سه جزءی که در بالا توضیح داده شده اند اجزای اصلی اند که به این سیستم اجازه ی کار می دهند. پولی های با شعاع متغیر قلب CVT هستند، هر پولی از دو مخروط با زاویه راس ٢٠ درجه که رو در روی یکدیگر قرار دارند تشکیل شده است، تسمه ای در شیار بین دو مخروط قرار دارد، در صورت لاستیکی بودن تسمه ها از تسمه های V شکل استفاده می شود، تسمه های V شکل از آنجا نام خود را می گیرند که سطح مقطع V شکل دارند که اصطکاک تسمه با پولی را افزایش می دهد.
پروژه سیستم انتقال قدرت پیوسته (CVT)، در 24 اسلاید، با فرمت powerpoint و 9 صفحه با فرمت word به زبان فارسی، همراه با 5 فایل ویدیویی که نحوه کار و تاثیر سیستم انتقال قدرت CVT را نمایش می دهد و تصاویر و ذکر نکات مهم سیستم cvt به ترتیب زیر گردآوری شده است:
تاریخچهانواع CVTCVT تسمه اینکته های مهمتاثیر CVTCVT چنبره ایCVT هیدرواستاتیکینحوه کارکرد CVT هیدرواستاتیکیبررسی اجزاء ماشین و سیستم های انتقال قدرت
مبانی سیستم انتقال قدرت در خودروهای سواری
محاسبات اجزاء گیربکس ساده

جهت دانلود پروژه سیستم انتقال قدرت پیوسته (CVT) بر لینک زیر کلیک نمایید.
سیستم انتقال قدرت پیوسته
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند
طراحی و انتخاب کلاچ ها و ترمزها
پیش بینی عمر خزشی پره توربین گازی
بررسی انواع یاتاقان ها و کاربردهای آن ها
بررسی و مقایسه انواع بلبرینگ ها و کاربردهای آن
آشنایی با انواع یاتاقان ها
روش طراحی انواع کمک فنرها
تحلیل و طراحی اتصالات چسبی بین کامپوزیت ها و فلزات
زره، مواد، تئوری و طراحی
| | نسخه قابل چاپ | تعداد بازديد : 13 |
 |
| در این ویدئو آموزشی، نحوه مونتاژ سیستم تعلیق خودرو (Suspension) در نرم افزار Autodesk Inventor، به صورت گام به گام (75 دقیقه با کیفیت خوب)، به کاربر آموزش داده می شود.
توجه: فایل آموزش مونتاژ سیستم تعلیق خودرو بصورت کاملا تصویری، قدم به قدم و فاقد صدا می باشد. در این کلیپ آموزشی به گوشه ای از توانمندی های نرم افزار اینونتور پی خواهید برد.
شبیه سازی و آنالیز سیستم تعلیق و فرمان خودرو با نرم افزار آدامز
بررسی و آشنایی با انواع فنربندی و سیستم تعلیق خودرو
روش طراحی انواع کمک فنرها
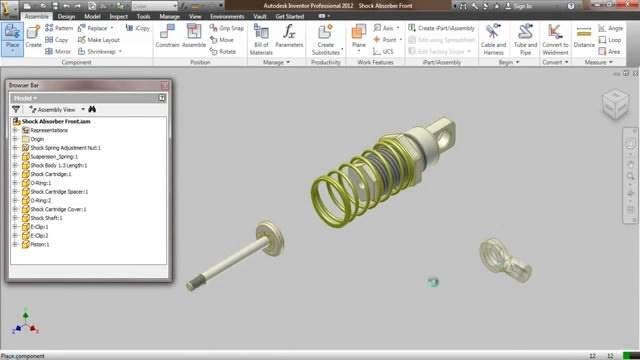
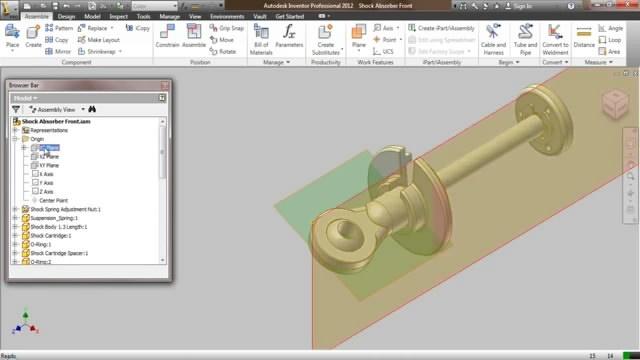
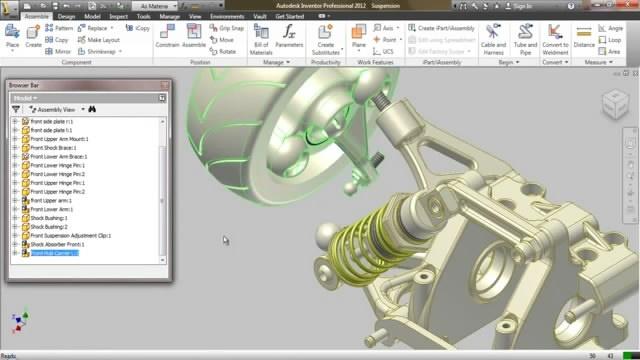

آموزش اینونتور، آموزش مونتاژ سیستم تعلیق خودرو (Suspension) در نرم افزار Autodesk Inventor
اگر به فراگیری مباحث مشابه مطلب بالا
علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند
معرفی و بررسی انواع سیستم های ترمز خودرو
طراحی و انتخاب کلاچ ها و ترمزها
اصول مهندسی انواع سیستم های تعلیق و محرک
سیستم تعلیق خودرو برای یک چرخ
طراحي بدنه، طراحی داخلی و آرشیتکتوری خودروي هیبریدی
طراحي شاسی خودروي هیبریدی شهری کم مصرف
بلوپرینت و نقشه های آماده جهت طراحی و مدلسازی سه بعدی خودرو
مبانی دینامیک خودرو
| | نسخه قابل چاپ | تعداد بازديد : 27 |
جزوه آموزش طراحی مکانیزم ها (Mechanism Design) دانشگاه کالیفرنیا آمریکا، یک جزوه جامع و کم نظیر از آموزش طراحی مکانیزم ها می باشد. الگوی آموزشی این جزوه مبتنی بر آموزش با توضیحات کامل به همراه مثال های کاربردی و مفهومی و محاسبات مربوطه می باشد. این جزوه مشتمل بر 322 صفحه، در 11 فصل، به زبان انگلیسی روان و به همراه تصاویر و روابط ریاضی، به ترتیب زیر گردآوری شده است:
طراحی قالب و قالب سازی
قالب فلزی و برش
راهنمای جامع طراحی قالب
مهندسی طراحی قالب های تزریق پلاستیک

Mechanism Design - Enumeration of Kinematic Structures According to Function - Booklets
Chapter 1: Introduction
Introduction
A Systematic Design Methodology
Links and Joints
Kinematic Chains, Mechanisms, and Machines
Kinematics of Mechanisms
Planar, Spherical, and Spatial Mechanisms
Kinematic Inversions
Summary
References
Chapter 2: Basic Concepts of Graph Theory
Degree of a Vertex
Walks and Circuits
Connected Graphs, Subgraphs, and Components
Articulation Points, Bridges, and Blocks
Parallel Edges, Slings, and Multigraphs
Directed Graph and Rooted Graph
Complete Graph and Bipartite
Graph Isomorphisms
Tree
Planar Graph
Spanning Trees and Fundamental Circuits
Euler’s Equation
Topological Characteristics of Planar Graphs
Matrix Representations of Graph
Adjacency Matrix
Incidence Matrix
Circuit Matrix
Path Matrix
Contracted Graphs
Dual Graphs
Summary
References
Exercises
Chapter 3: Structural Representations of Mechanisms
Introduction
Functional Schematic Representation
Structural Representation
Graph Representation
Advantages of Using Graph Representation
Matrix Representation
Adjacency Matrix
Incidence Matrix
Summary
References
Exercises
Chapter 4: Structural Analysis of Mechanisms
Introduction
Correspondence Between Mechanisms and Graphs
Degrees of Freedom
Loop Mobility Criterion
Lower and Upper Bounds on the Number of Joints on a Link
Link Assortments
Partition of Binary Link Chains
Structural Isomorphism
Permutation Group and Group of Automorphisms
Group
Group of Automorphisms
Identification of Structural Isomorphism
Identification by Classification
Identification by Characteristic Polynomial
Optimum Code
Degree Code
Partially Locked Kinematic Chains
Summary
References
Exercises
Chapter 5: Enumeration of Graphs of Kinematic Chains
Introduction
Enumeration of Contracted Graphs
Enumeration of Conventional Graphs
Atlas of Graphs of Kinematic Chains
Summary
References
Exercises
Chapter 6: Classification of Mechanisms
Introduction
Planar Mechanisms
Planar Linkages
Planar Geared Mechanisms
Planar Cam Mechanisms
Spherical Mechanisms
Spatial Mechanisms
Spatial One-dof Mechanisms
Spatial Multi-dof, Multiple-Loop Mechanisms
Summary
References
Exercises
Chapter 7: Epicyclic Gear Trains
Introduction
Structural Characteristics
Buchsbaum–Freudenstein Method
Genetic Graph Approach
Parent Bar Linkage Method
Mechanism Pseudoisomorphisms
Atlas of Epicyclic Gear Trains
One-dof Epicyclic Gear Trains
Two-dof Epicyclic Gear Trains
Three-dof Epicyclic Gear Trains
Kinematics of Epicyclic Gear Trains
Fundamental Circuit Equations
Examples and Summary
References
Exercises
Chapter 8: Automotive Mechanisms
Introduction
Variable-Stroke Engine Mechanisms
Functional Requirements
Structural Characteristics
Enumeration of VS-Engine Mechanisms
Constant-Velocity Shaft Couplings
Functional Requirement
Structural Characteristics
Enumeration of C-V Shaft Couplings
Automatic Transmission Mechanisms
Functional Requirements
Structural Characteristics
Enumeration of Epicyclic Gear Mechanisms
Canonical Graph Representation of EGMs
Structural Characteristics of Canonical Graphs
Enumeration of Canonical Graphs
Identification of Fundamental Circuits
Detection of Transfer Vertices
Atlas of Epicyclic Gear Transmission Mechanisms
Summary
References
Exercises
Chapter 9: Robotic Mechanisms
Introduction
Parallel Manipulators
Functional Requirements
Structural Characteristics
Enumeration of Planar Parallel Manipulators
Enumeration of Spherical Parallel Manipulators
Enumeration of Spatial Parallel Manipulators
Robotic Wrist Mechanisms
Functional Requirements
Structural Characteristics
Enumeration of Three-dof Wrist Mechanisms
Summary
References
Exercises
Chapter 10: Solving m Linear Equations in n Unknowns
Solving One Equation in n Unknowns
Solving m Equations in n Unknowns
References
Chapter 11: Atlas
Atlas of Contracted Graphs
Atlas of Graphs of Kinematic Chains
Atlas of Planar Bar Linkages
Atlas of Spatial One-dof Kinematic Chains
Atlas of Epicyclic Gear Trains
Atlas of Epicyclic Gear Transmission Mechanisms
قالب تزریق پلاستیک
قالب آهنگری و فورج
قالب هیدروفرمینگ
جزوه با فرمت PDF بوده و به راحتی بر روی گوشی های اندروید و کامپیوتر قابل استفاده می باشد.
جهت دانلود جزوه کم نظیر آموزش طراحی مکانیزم ها (Mechanism Design) دانشگاه کالیفرنیا آمریکا بر لینک زیر کلیک نمایید:
جزوه آموزش طراحی مکانیزم ها (Mechanism Design) دانشگاه کالیفرنیا آمریکا
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
بررسی و مقایسه انواع بلبرینگ ها و کاربردهای آن
بررسی انواع یاتاقان ها و کاربردهای آن ها
طراحی و انتخاب کلاچ ها و ترمزها
بررسی اجزاء ماشین و سیستم های انتقال قدرت
محاسبات اجزاء گیربکس ساده
فلایویل
کلاچ
روش طراحی انواع کمک فنرها
طراحی سیستم های انتقال
آشنایی با انواع یاتاقان ها
طراحی انواع بادامک و پیروها
| | نسخه قابل چاپ | تعداد بازديد : 12 |